
The paradigm of spatial documentation has undergone a fundamental transformation since the emergence of sophisticated computer vision and photogrammetric algorithms. At the vanguard of this shift is Pix4D, a Swiss enterprise established in 2011 as a spin-off from the École Polytechnique Fédérale de Lausanne (EPFL) Computer Vision Lab. Over the course of its decade-long evolution, the company has transitioned from an academic exploration into a global leader in professional photogrammetry, providing a suite of desktop, cloud, and mobile solutions that convert raw imagery into actionable 2D maps and high-fidelity 3D models. This report provides an exhaustive technical dissection of the Pix4D computational framework, the practical implementation of its modular product ecosystem, and an empirical review of its application across the construction, mining, agriculture, and public safety sectors.
Theoretical Foundations and Computational Photogrammetry
The operational efficacy of Pix4D software is rooted in the principles of Structure from Motion (SfM) and multi-view stereopsis. These techniques represent a significant advancement over traditional photogrammetry, which historically relied on fixed-base stereo pairs with known relative orientations.
Structure from Motion (SfM) Mechanisms
Structure from Motion is a range imaging technique that estimates three-dimensional structures from two-dimensional image sequences by identifying local motion signals across multiple perspectives. Within the Pix4D pipeline, this process involves three primary computational phases: feature detection and matching, camera motion estimation, and the recovery of 3D geometry.
The algorithm begins by detecting characteristic “keypoints” in each image—visual features that are invariant to changes in scale, rotation, and illumination. The software then computes matches between these keypoints across overlapping images. The density of these matches is a critical indicator of the reconstruction’s relative accuracy. For example, a “successful” quality check typically requires a median of over 1,000 matches per calibrated image at high resolution. Following matching, the software executes bundle adjustment, a simultaneous refinement of the 3D coordinates of the points and the camera’s intrinsic and extrinsic parameters.
Mathematical Determinants of Resolution: Ground Sampling Distance (GSD)
The primary metric for spatial resolution in any photogrammetric survey is the Ground Sampling Distance (GSD), which represents the distance between the centers of two consecutive pixels as measured on the ground surface. The GSD is a direct function of the camera’s sensor width (Sw), focal length (f), flight altitude (H), and the image width in pixels (i), expressed as: GSD = (H x Sw)/(f x i).
The relationship between GSD and accuracy is linear; horizontal accuracy is generally expected to fall within 1 to 2 times the GSD, whereas vertical accuracy typically ranges from 2 to 3 times the GSD. Achieving sub-centimeter resolution therefore necessitates a combination of high-resolution sensors and lower flight altitudes, balanced against the increased computational overhead of processing larger image datasets.
The Pix4D Product Ecosystem: A Modular Architecture
Pix4D has cultivated a modular software suite designed to address the specific needs of diverse industries, ranging from rapid forensic analysis to large-scale corridor mapping.
The relationship between GSD and accuracy is linear; horizontal accuracy is generally expected to fall within 1 to 2 times the GSD, whereas vertical accuracy typically ranges from 2 to 3 times the GSD. Achieving sub-centimeter resolution therefore necessitates a combination of high-resolution sensors and lower flight altitudes, balanced against the increased computational overhead of processing larger image datasets.
The Pix4D Product Ecosystem: A Modular Architecture
Pix4D has cultivated a modular software suite designed to address the specific needs of diverse industries, ranging from rapid forensic analysis to large-scale corridor mapping.
Comparative Technical Analysis of Processing Engines
The evolution of the Pix4D suite is most evident in the distinction between its legacy flagship, PIX4Dmapper, and its next-generation platform, PIX4Dmatic. While both utilize SfM algorithms, their underlying architectures are optimized for different hardware profiles and dataset scales.
Technical Feature | PIX4Dmapper | PIX4Dmatic |
Primary Dataset Capacity | Optimized for small to medium projects | Capable of processing 10,000+ images |
Processing Speed | Standard multi-threading | ~70% faster total processing time |
DSM Generation | Standard interpolation | 82% faster generation via optimized algorithms |
Calibration Method | Accurate Geolocation and Orientation | Trusted Location and Orientation |
Hardware Acceleration | Limited GPU support | Full NVIDIA CUDA acceleration for calibration/densification |
LiDAR Integration | Not supported natively | Native fusion of LiDAR and RGB point clouds |
The architectural shift in PIX4Dmatic toward the “Trusted Location and Orientation” pipeline is particularly significant for RTK/PPK workflows. By prioritizing the high-precision telemetry data from modern UAVs, PIX4Dmatic reduces the computational burden of searching for keypoint matches, enabling significantly faster calibration even in environments with repetitive textures or low visual contrast.
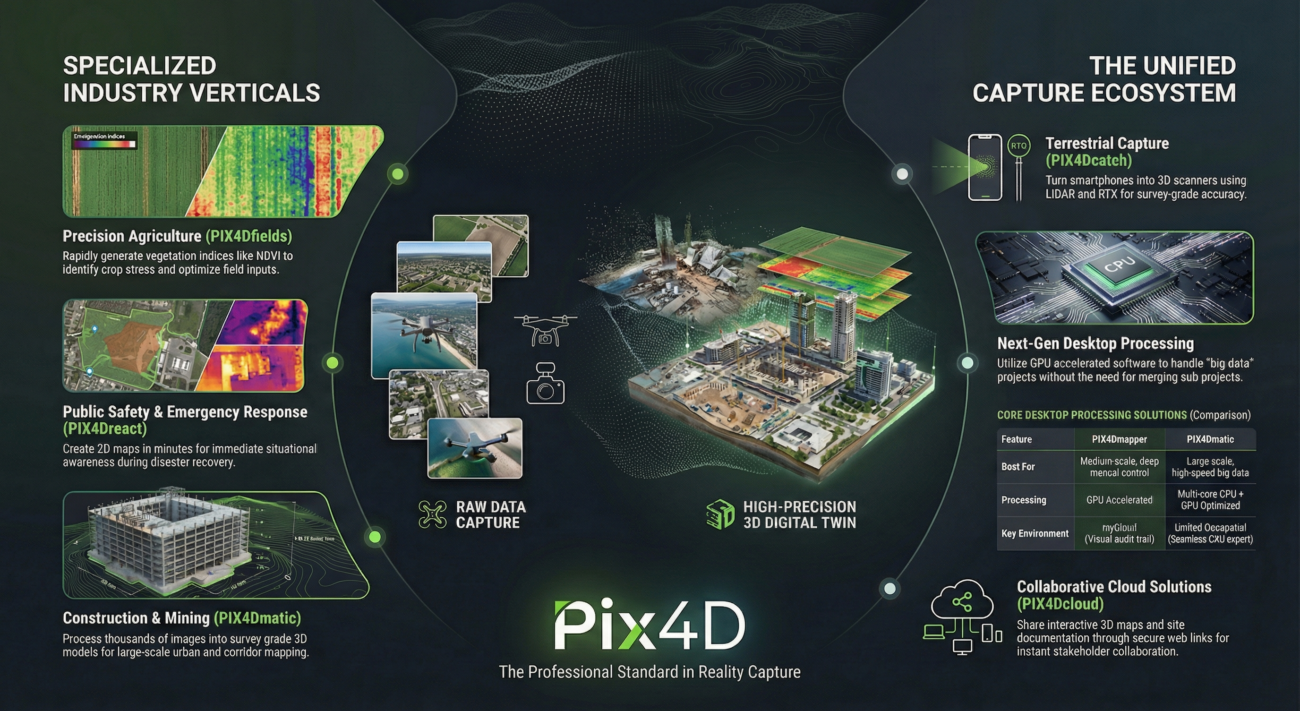
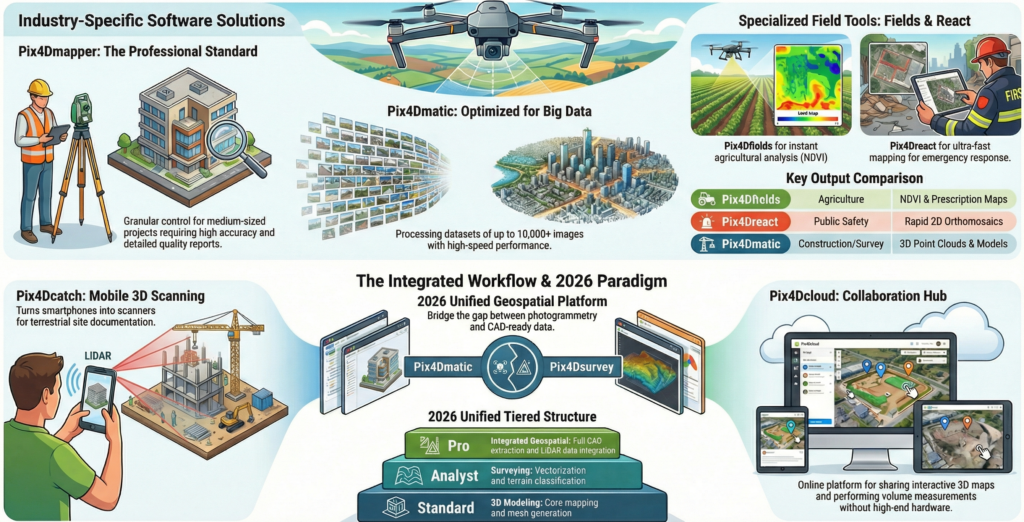
Specialized Vertical Solutions
In addition to its general processing engines, Pix4D provides industry-specific applications that integrate specialized analytical tools.
- PIX4Dfields: Designed for precision agriculture, this software enables in-field, offline processing of RGB and multispectral imagery to generate vegetation indices (e.g., NDVI, NDRE) and prescription maps for variable-rate application.
- PIX4Dreact: Optimized for public safety and emergency response, PIX4Dreact prioritizes processing speed over complex 3D modeling, delivering 2D orthomosaics in minutes for rapid situational awareness.
- PIX4Dsurvey: Functions as a bridge between the photogrammetric point cloud and CAD/GIS environments, allowing users to vectorize features (e.g., curbs, catenaries, and building outlines) for engineering deliverables.
- PIX4Dcatch: A mobile application that leverages the LiDAR and camera sensors on handheld devices to perform terrestrial 3D scans. When paired with an RTK rover, it provides survey-grade accuracy for trench documentation and infrastructure inspections.
Practical Implementation: Professional Protocols for Data Acquisition
The integrity of a photogrammetric reconstruction is largely determined by the quality and geometry of the input data. Professional implementation requires adherence to strict acquisition protocols.
Image Overlap and Flight Geometry
SfM algorithms require significant redundancy to accurately triangulate 3D points. Overlap requirements vary based on the complexity of the subject and the desired output accuracy.
Application Context | Recommended Frontal Overlap | Recommended Side Overlap | Optimal Camera Angle |
General Terrain/Mapping | 75% | 60% | Nadir (90°) |
Dense Vegetation/Forestry | 85% | 85% | Nadir |
Building/Facade Reconstruction | 85% | 70% | Oblique (10° – 35°) |
Large Vertical Structures | 90% | 60% (height levels) | Oblique/Manual |
Corridors (Roads/Rail) | 85% | 60% (min 2 lines) | Nadir/Oblique |
Homogenous Surfaces (Snow/Sand) | 85% | 70% | Nadir |
Sensor Calibration and Environmental Configuration
Effective implementation necessitates the optimization of camera settings to eliminate motion blur and ensure consistent exposure. Shutter speed should be fast enough to compensate for drone velocity, and the ISO should be kept as low as possible to minimize noise. A critical requirement for professional surveys is the locking of the focal length to infinity and the deactivation of internal stabilization and dewarping features, as these can interfere with the software’s ability to model the camera’s internal geometry.
Environmental conditions play a decisive role in data quality. Soft, consistent lighting provided by cloudy skies is ideal for photogrammetry, as it reduces harsh shadows and prevents the loss of detail in overexposed highlights. Wind speeds must be monitored to prevent motion blur and ensure aircraft stability, while rain can introduce artifacts through water droplets on the lens and alterations to surface reflectivity.
Hybrid Workflows: The Fusion of LiDAR and Photogrammetry
A significant technological milestone within the Pix4D ecosystem is the capacity to fuse terrestrial LiDAR data with aerial photogrammetric models. This hybrid approach, primarily facilitated by PIX4Dcatch and PIX4Dmatic, addresses the historical limitations of each sensor.
Terrestrial Capture with PIX4Dcatch and RTK
PIX4Dcatch enables field teams to document assets that are often obscured from an aerial perspective, such as building overhangs, tunnels, or open trenches. By utilizing the LiDAR sensors on mobile devices, the app captures depth maps that provide a robust geometric foundation. When integrated with a compatible RTK rover via Bluetooth, the system records the precise trajectory and orientation of the device, georeferencing the scan with survey-grade precision.
Point Cloud Densification and Alignment
In the PIX4Dmatic processing environment, users can generate three distinct point clouds from hybrid datasets:
- Dense Point Cloud: Derived entirely from RGB images via photogrammetric matching. It offers high texture quality and density in well-textured areas.
- Depth Point Cloud: Generated from the LiDAR depth maps captured by the mobile device. It excels in low-texture or homogenous areas where photogrammetry often fails.
- Depth & Dense Fused Point Cloud: This final output leverages the strengths of both sources. PIX4Dmatic applies the accurate orientation derived from photogrammetry to correct any drift inherent in the mobile device’s IMU/GPS, using the LiDAR data to “fill in” gaps in homogenous regions.
This fusion process ensures a complete 3D model that captures both the broad aerial context and the intricate terrestrial details, providing a unified geospatial platform for infrastructure management and site documentation.
Case Study: Construction Progress Monitoring and Rework Mitigation
The construction industry has historically struggled with productivity and the high cost of reworks resulting from deviations between as-designed plans and as-built reality. Pix4D technology provides a mechanism for rapid verification and collaboration.
W.E. O’Neil: Identifying Concrete Deck Discrepancies
W.E. O’Neil Construction, a Chicago-based firm, utilized PIX4Dcloud Advanced and drones on the One Oak Brook Commons project, a 17-story residential development. The primary objective was to ensure the accurate placement of coordinated penetrations (sleeves) on concrete decks prior to pouring.
The workflow involved a 15-minute drone flight to capture images of the deck, followed by automated processing in PIX4Dcloud Advanced. Within one hour, the team received a georectified orthomosaic, which was then overlaid with the original design plans. Over a two-month period covering levels 5 to 17, the team identified approximately 48 missing or misplaced sleeves. By detecting these errors before the concrete pour, the project avoided an estimated $98,000 in potential rework costs. This case study highlights the ROI of frequent, low-altitude aerial surveys in complex urban construction.
Magil Construction: Scaling with Microdrones and Cloud Integration
Magil Construction in Montreal implemented PIX4Dcloud to centralize site documentation and enhance teamwork across departments. By utilizing sub-249g microdrones, the team was able to conduct frequent site flights with minimal regulatory overhead and simplified pilot onboarding. The ability to share 3D models and high-resolution maps via a centralized platform allowed stakeholders to track progress, compare captures side-by-side using the Overlay Tool, and export data into CAD/GIS formats for further analysis.
Case Study: Precision Agriculture and Nutrient Management
The application of PIX4Dfields in agriculture enables a transition from uniform field treatments to targeted, variable-rate applications, significantly reducing input costs and environmental impact.
Quantitative Analysis of Fertilizer Savings
In a multi-year study focusing on St. Augustine grass production, researchers utilized PIX4Dfields to assess nitrogen levels via multispectral drone imagery. The project involved developing a custom reflectivity index that demonstrated a strong correlation with laboratory-tested nitrogen values. By utilizing the zonation and prescription tools in PIX4Dfields, the grower generated Variable Rate Application (VRA) maps that guided the fertilizer application machinery.
Implementation Phase | Measured Outcomes |
Area Surveyed | 3,000 acres |
Duration | 6-month period |
Average Nitrogen Reduction | 23 lb/acre |
Total Fertilizer Saved | 34.5 tons |
Total Cost Savings | $25,875 (at $750/ton) |
Beyond cost savings, the implementation of VRA strategies helps prevent the over-application of chemicals, minimizing nutrient runoff into groundwater and enhancing overall soil health.
AI-Enabled Crop Counting and Yield Forecasting
Digital monitoring in agriculture has further expanded through the use of artificial intelligence for crop counting and condition assessment. PIX4Dfields utilizes machine learning models to identify individual plants and weeds, allowing growers to assess the quality of sowing operations and seed germination. This capability is particularly valuable in orchard management, where UAV scanning enables the pinpoint identification of problematic trees, allowing for localized treatments that reduce resource expenditure.
Case Study: Volumetric Accuracy in Mining and Quarrying
Inventory management in the mining sector requires highly accurate volumetric measurements for production forecasting, auditing, and tax liability assessment. Traditional surveying methods are often hazardous and prone to interpolation errors.
Comparative Performance: UAV Photogrammetry vs. Terrestrial Laser Scanning
A case study conducted by GEO Jobe UAV compared Pix4D-based photogrammetry against terrestrial laser scanning for stockpile volume calculation. The study revealed that terrestrial laser scanners, while precise, often overestimate volumes due to their ground-based perspective, which fails to accurately capture the “cratered” or irregular top surfaces of piles.
The aerial perspective provided by drones, processed in PIX4Dmapper, delivered a more realistic surface model. Mining companies utilizing this workflow report measurement accuracies within a 2-5% margin for stockpile volumes. In a rigorous side-by-side comparison, drone-based data collection resulted in a 3.2% improvement in mineral production forecasts.
Accuracy and Safety Metrics in Open-Pit Quarries
A mapping framework proposed for open-pit quarries confirmed that drone technology provides an accurate, cost-effective, and safe alternative to traditional topographic methods.
Metric | Traditional Survey | UAV Photogrammetry (Pix4D) |
Root Mean Square Error (RMSE) | N/A | 0.019 |
Volumetric Error (to actual) | 1.3% | 2.6% |
Allowable Error Threshold | ± 3% | ± 3% |
Personnel Safety | High Exposure | Remote/Safe Distance |
While the traditional approach showed a slightly lower percentage error, both methods fell well within the acceptable ± 3% threshold, making the drone approach the preferred choice due to its significant advantages in speed and safety.
Case Study: Public Safety and Forensic Accident Reconstruction
For forensic investigators and law enforcement agencies, the speed and accuracy of scene documentation are critical for both legal proceedings and the minimization of secondary traffic accidents caused by road closures.
Maryland State Police: Accelerating Incident Investigation
The Maryland State Police (MSP) Crash Team integrated PIX4Dmatic and PIX4Dcatch into their investigation workflow, merging aerial drone captures with terrestrial mobile scans. This hybrid method allowed the team to document complex scenes more comprehensively than traditional total stations.
The impact on operational efficiency was substantial: the average scene mapping time was reduced from approximately 1.5 – 2 hours down to just 20 minutes, saving over an hour of investigative time per incident. This workflow was instrumental in a vehicular manslaughter prosecution, where the merged model accurately represented the scene despite data being collected over two separate days under varying weather conditions.
Forensic Validation of Vehicle Damage Analysis
Studies conducted by the Czech Technical University (CTU) in Prague evaluated the effectiveness of PIX4D solutions for documenting vehicle deformations and interior damage. Investigators performed over 35 measurements across 100 projects of varying complexity. The results confirmed that the PIX4D forensic solution delivered deviations of just 1-2 cm, with point cloud densities comparable to traditional terrestrial scanners. This validated photogrammetry as a viable, cost-effective alternative for high-detail forensic documentation, allowing for rapid data collection while maintaining the accuracy standards required for courtroom presentation.
Interoperability: Integrating Pix4D into Enterprise Workflows
The utility of photogrammetric data is maximized when it can be seamlessly integrated into existing professional GIS and CAD platforms.
CAD and GIS Export Protocols
Pix4D provides established pathways for exporting data to major software suites, including Autodesk and Esri products.
- AutoCAD Integration: Georeferenced GeoTIFF orthomosaics can be imported into AutoCAD using the GEOREFIMG command. For large orthomosaics that exceed AutoCAD’s file size limits, users can either load individual tiles or use open-source software like QGIS to convert BigTIFF files into traditional formats.
- Revit and 3ds Max: Point clouds can be imported into Revit in.las or.rcp formats for BIM modeling. Textured 3D meshes (in.obj or.fbx) can be rendered in 3ds Max or Maya for high-fidelity visualizations.
- ArcGIS Online Alliance: In 2026, Esri and Pix4D launched a real-time terrestrial mapping workflow. PIX4Dcatch data, including RTK-georeferenced trajectories and scans, can be published directly into ArcGIS Online as Scene Layers. This allows for the instant update of a master geodatabase with professional accuracy, enabling teams to document subsurface assets and verify as-built status in real-time.
Technical Guide for Accuracy Validation: The Quality Report
The Quality Report is the fundamental tool for assessing the reliability of a Pix4D project. It provides a statistical summary of the reconstruction’s internal and external consistency.
KPI Section | Critical Success Threshold | Significance |
Images Calibrated | > 95% in one block | Ensures a complete and connected model |
Keypoint Matching | > 1,000 matches per image | Indicates high relative accuracy and tie-point density |
Camera Optimization | < 5% difference (initial vs. optimized) | Confirms the validity of the camera’s internal model |
GCP RMSE | ≤ 1.5 x GSD | Validates absolute geolocation accuracy |
Mean Reprojection Error | ≤ 1 pixel | Indicates the precision of the 3D point estimation |
The Absolute Geolocation Variance section of the report is particularly vital for surveying. It calculates the relative error for each axis (Rx, Ry, Rz) using the initial GPS positions (Xi, Yi, Zi) and the computed positions (Xc, Yc, Zc), adjusted for user-set accuracy (Ax, Ay, Az): Rx = (Xi – Xc)/Ax.
If more than 99.6% of geolocated and calibrated images fall within a predefined error interval, the project is considered to have high georeferencing integrity.
Infrastructure and Organizational Management
As geospatial data volumes scale, the underlying computing infrastructure and administrative control become critical components of the enterprise workflow.
AWS Graviton and Computational Cost Optimization
Pix4D migrated its containerized services from traditional x86-based EC2 instances to AWS Graviton processors to optimize cloud processing costs. AWS Graviton, a custom ARM-based CPU, delivers up to 40% better price-performance while utilizing 60% less energy. By building multi-architecture Docker images and leveraging Python and Golang’s ARM compatibility, Pix4D successfully reduced its infrastructure compute costs by 20% while maintaining the performance levels required for intensive photogrammetric processing.
Enterprise Scalability through Organization Management
Launched in 2025, the Organization Management framework allows companies to manage software licenses and users centrally. This model shifts subscription ownership from individuals to the organization, enabling unlimited seats and facilitating scalable collaboration across internal departments and external partners. Centralized administrative control ensures that everyone from field crews to project managers can access the same data context, assign roles, and manage access securely within a unified cloud environment.
The Future of Reality Capture: Neural Rendering and Gaussian Splatting
A transformative development in 2025 has been the integration of georeferenced Gaussian Splatting into the Pix4D ecosystem. This neural rendering technique provides a leap in visualization technology, moving beyond the traditional limitations of meshes and point clouds.
High-Fidelity Professional Visualization
Gaussian Splatting delivers visually striking 3D models that are particularly effective for documenting complex engineering assets and utility infrastructure. Unlike standard meshes, which can suffer from “ghosting” or loss of detail in intricate areas, Gaussian splats provide a high-fidelity representation that is both georeferenced and measurable.
Initially launched for terrestrial PIX4Dcatch workflows, the technology was expanded to support aerial drone imagery within a single year. This provides construction and infrastructure teams with a consistent output layer for inspections and progress validation, replacing fragmented visuals with a single, high-fidelity representation of the entire site.
The Unified Geospatial Platform Vision
The evolution of PIX4Dmatic as a “unified geospatial platform” reflects an industry trend toward workflow consolidation. By combining large-scale processing with survey-grade extraction in a single workspace, Pix4D eliminates the friction of moving data between disparate tools. Professionals can now generate contour lines, perform volume calculations, and refine 3D models directly on the processed data, ensuring that the “capture-to-deliverable” path remains seamless and connected.
Conclusion
The technical and empirical evidence presented in this analysis underscores the strategic value of the Pix4D ecosystem across a broad spectrum of industrial applications. By leveraging the computational rigors of Structure from Motion and the geometric precision of LiDAR fusion, Pix4D has enabled a transition from manual, time-intensive surveying to automated, digital-twin workflows.
The case studies highlight quantifiable economic benefits, including $98,000 in saved rework costs for high-rise construction, $25,000 in fertilizer savings for agriculture, and an 80% reduction in scene documentation time for public safety. These outcomes are underpinned by a robust technical framework that prioritizes accuracy validation through detailed Quality Reports and ensures enterprise scalability through cloud-optimized infrastructure and centralized organization management.
As emerging technologies like Gaussian Splatting and real-time GIS integration continue to mature, the capacity to “make the invisible visible” will become an indispensable component of infrastructure management, resource optimization, and public safety. The continued evolution of Pix4D from a photogrammetry tool into a unified geospatial engine positions it as a cornerstone of the modern digital economy, providing the clarity and insight required to address the world’s most complex physical challenges.
References
- Pix4D. https://www.pix4d.com/
- Activeloop. What is Structure from Motion (SfM)? | Activeloop Glossary. https://www.activeloop.ai/resources/glossary/structure-from-motion-sf-m/
- Best practices for image acquisition and photogrammetry. https://support.pix4d.com/hc/best-practices-for-image-acquisition-and-photogrammetry
- Quality report – PIX4Dmatic. https://support.pix4d.com/hc/en-us/articles/360040686852
- Tegakari. (2024, November 25). What are the features and recommended requirements of PIX4Dfields / PIX4Dmapper?. TEGAKARI. https://www.tegakari.net/en/2024/11/pix4d-tks/